- ワークロボット
- AUDEBU1002 Robot(オーデブ1002 ロボット)

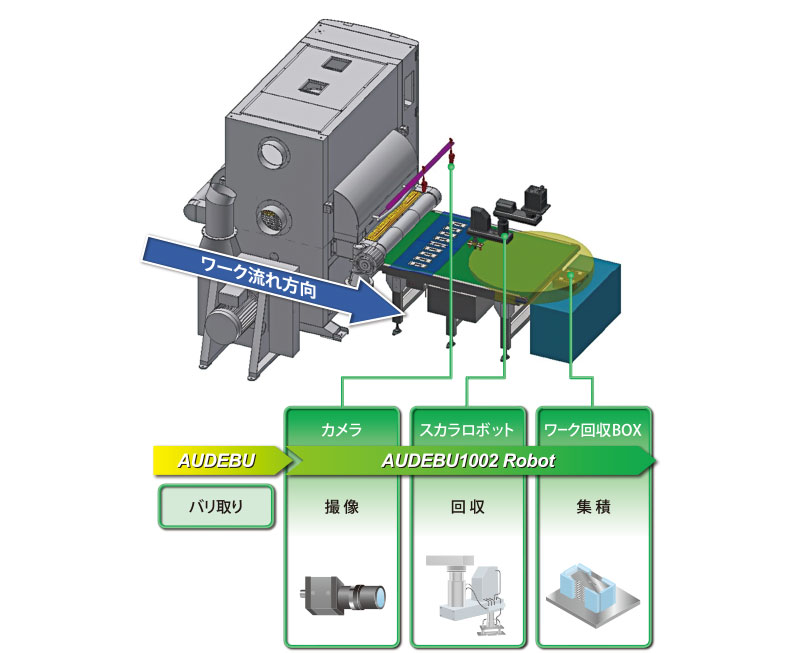
AUDEBU1002 Robot(オーデブ1002ロボット)は、バリ取り後のワークを自動回収するロボットです。
プレス装置等と連動させると、カメラが自動で部品の形状や位置、角度を認識して、ロボットアームで部品の向きを揃えて集積します。
これまで作業者を必要としていた、バリ取り機の入口⇔出口の移動がなくなり、「連続バリ取り作業」を実現しました。
コンベアの速度に合わせて、ロボットが自動追従するためワークの流れる方向に従って回収する、無人営業が可能です。
人的リソースの削減にもつながる、オートメーション化に欠かせない製品です。
特徴
- 作業者がバリ取り機の入口⇔出口を移動する必要が無く「連続バリ取り作業」が可能に
- プレス装置等との連動によりバリ取り機の無人運転が可能に
- カメラにより製品形状・位置・角度を自動認識し、ロボットアームで製品を回収⇒向きを揃えて集積
- コンベア速度に合わせてロボット動作が自動追従しワークを回収
本体寸法図
お問い合わせください。
テクニカルデータ
| 全長 | 4120mm |
|---|---|
| 全幅 | 2500mm(エアーナイフ装置含む) |
| 全高 | 1350mm(操作盤含む) |
| パスライン高さ | 1030kg(エアーナイフ装置含む) |
| コンベア速度 | 910mm±50mm |
| 可搬ワーク重量 | 6mm |
| ハンド重量 | 800mm |
| ハンド重量 | 150mm X 40mm |
| 供給電圧 | AC 220V三相50/60Hz |
| 圧縮AIR | 0.4Mpa以上 |
| AIR消費量 | 58ℓ/分(ANR) |
※本機は、都合により仕様を変更する場合があります。
安全に関するご注意
本機の集塵部は研削により発生する粉塵を吸引する為の装置です。以下のような粉塵を吸引する恐れのある研削作業は行なわないでください。
- 爆発性物質(粉塵爆発を起こす可能のある物を含む)
- 引火性物質
- 多量の火花を含んだ物質
- 火種
- 可燃性物質
- 条件により危険な性質に変化する物質など
異なる物質の粉塵が混合する事により危険な物質に変化することがあります。粉塵の混合に伴う安全性が確認できない場合は同一機での共用使用は行なわないで下さい。
長物短物ワークの搬入時の注意
- 60mm X 1000mm などの短冊材をバリ取り機に搬入作業を行う時、本体テーブル面と平行にワークを入れてください。
- ワークを平行に搬入し、テーブルとワークが接触し、ワーク吸着しているか確認の上、作業を進めてください。
- 本体の入り口・出口側には案内ガイドか作業台を置き、作業をしてください。
- ワークの先端をテーブル面から話して作業を行うと、ワークが飛ばされ非常に危険ですので、必ずワーク先端が吸着しているのを確認してください。
- 表面処理材のエッジバリ取り加工は納入先お客様と仕上がり品質(サビ、キズ等)について良く相談してください。
CONTACTお問い合わせ
-
お電話でのお問い合わせ
-
メールでのお問い合わせ

